

本文整理了自抗扰控制ADRC的由来及其原理pid与adrc区别,主要参考韩京清老师自抗扰控制技术PID控制PIDProportionalIntegral。
在过热汽温控制系统pid与adrc区别,PID与ADRC有一些基本结论,PID控制基本可以实现动态波动。
就是网上常常看到的那个PID与ADRC在转盘实验台上的比较马到成功,韩老师也非常高兴,对ADRC技术的前景充满了信心就这。
在仿真中,将GAADRC方法与PID,ADRC方法进行对比,证明GAADRC方法的控制效果有所提升并在基于LinksRT实时仿真系统的。
所以给人感觉上似乎ADRC控制理论又回到PID控制理论了以后再细写吧,有意愿的朋友可以读读韩京清教授的书籍和论文温馨提。
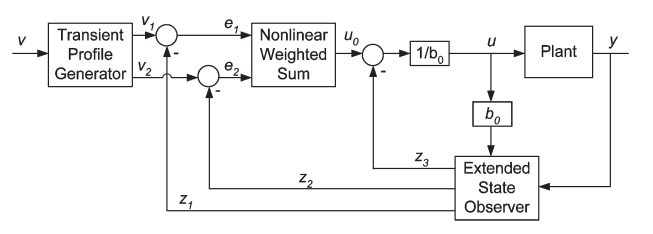
ADRC主要由三部分组成跟踪微分器,扩展状态观测器和非线性组合PID这三部分的作用分别为安排过渡过程,柔化指令信号。
角速度使用角度微分或是陀螺仪值,控制的周期其中控制算法包括双环PID控制,ADRC控制等。
On the characteristics of ADRC a PID interpretation Science in China Series FInformation Science, vol 63, no 109 L Luna, and R。




还没有评论,来说两句吧...